
To compare the gait event identification of five algorithms recommended in the literature with those provided by force plate (gold standard) in children with unilateral or bilateral spastic cerebral palsy (SCP).
MethodsThis was a cross-sectional study of the gait of three girls and four boys with a mean age of 8.6±4.7 years. Four children had unilateral SCP with an equinus gait pattern, and the remaining three children exhibited bilateral SCP with a slide/drag gait pattern. Kinematic and kinetic gait data were collected during barefoot walking at a comfortable speed. From a total of 202 steps, the detection of 202 foot-strike (FS) and 194 toe-off (TO) events by each algorithm was compared with the detection of these same events by the force plate. The error between the events detected by the algorithms and those detected by the force plate was determined in milliseconds. Repeated measures ANOVA was used to compare the errors among the algorithms.
ResultsThe algorithm reported by Ghoussayni et al. showed the best performance in all situations, except for the identification of FS events on the unaffected side in children with unilateral SCP. For these events, the algorithms reported by Desailly et al. and Zeni et al. showed the best performance.
ConclusionGhoussayni et al.’s algorithm can be used to detect gait events in children with SCP when a force plate is not available.
The gait of children with spastic cerebral palsy (SCP) has many differences compared to that of healthy children.1 Gait analysis performed using motion analysis systems can be used to identify and characterize these differences.2,3 One of the most time-consuming processes in motion analysis is the detection of gait cycle events.4 Force plates are the gold standard for identifying foot-strike (FS) and toe-off (TO) events.5 Considering the typical size of force plates and the stride length of a child, ensuring that a child steps with only one foot on each plate during data collection is difficult. To overcome this problem, kinematics-based algorithms for detecting gait events have been developed. Theoretically, algorithms based on the positions of markers and the speed at which they move can be used to detect critical gait events.6,7 In addition, these algorithms have been used to identify these events in situations in which a force plate is not available.6,7 Most algorithms have been developed based on the gait characteristics of healthy children5 and adults6,7 and are not directly applicable to the gait patterns of children with SCP. Considering the idiosyncrasies of the gait patterns of children with SCP, such as FS with the forefoot instead of the heel, these algorithms can fail to accurately detect the essential elements of gait analysis.8 In many cases, the accuracy of algorithms for automated gait event detection in children with SCP is low and, frequently, a time-consuming visual inspection becomes necessary.4
Bruening and Ridge4 compared the accuracy of nine algorithms for the identification of gait events in children with different types of SCP with that of visual classification. The authors hypothesized that in some gait types (e.g., when the foot is dragged in the swing phase), the use of a force plate might produce false results. Overall, five of the nine tested algorithms4 were recommended for estimating gait events in children with SCP. Since the accuracy of an algorithm varies according to the child's gait pattern, Bruening and Ridge4 classified four gait patterns: equinus, slide or drag, steppage (i.e., a child has a marching-type gait) and miscellaneous (i.e., a mix between at least two gait patterns). Depending on the gait type of a particular child with unilateral SCP or bilateral SCP and on the respective kinematic characteristics, a given algorithm may be more suited for properly estimating gait events than another.
Considering that the identification of events using a force plate has been the primary process for the automated data collection in motion analyses, the objective of the present study was to compare the gait event identification ability of the force plate with that of the five algorithms recommended by Bruening and Ridge4 for the same events in children with unilateral or bilateral SCP. We applied the recommendations in the literature without visual inspection of the events to investigate the applicability of the algorithms to the automated identification of events in different gait types in children with SCP. The results may help determine the best-suited algorithm for characterizing gait events in the absence of reliable kinetic information.
MethodsParticipantsThis cross-sectional study analyzed the gait of seven children with unilateral or bilateral SCP. Three girls and 4 boys were included among the participants, with a mean age of 8.6±4.7 years, a body weight of 27.0±14.0kg, and a height of 1.3±0.3m. The children were recruited from a philanthropic rehabilitation center in Belo Horizonte. Four children had unilateral SCP with an equinus gait pattern, and the remaining three children had bilateral SCP with a slide/drag gait pattern. The study was approved by the Research Ethics Committee of the Universidade Federal de Minas Gerais (UFMG), Belo Horizonte, MG, Brazil and the parents provided informed consent (CAAE: 2855914.8.00005149).
ProceduresReflective markers were secured on specific anatomical landmarks, i.e., the lateral and medial malleoli, the first and fifth metatarsal heads, and the most prominent aspect of the calcaneal tuberosity. The kinematic gait data of the children were collected using the Qualisys ProReflex Motion Capture Unit 240® (Gothenburg, Sweden), with eight cameras set around an eight-meter-long walkway. Data were collected at a frequency of 100Hz. The walkway was instrumented with two AMTI® force plates (Advanced Mechanical Technology, OR6-6, Watertown, MA, USA), which were synchronized with the Qualisys motion capture system to quantify the ground reaction force, a measure used to detect gait events. The children walked barefoot down the walkway at a comfortable walking speed approximately 10 times. A biomechanical model was implemented for each child based on the position of the reference markers obtained during data collection in the static standing position. This model was then applied to the dynamic files in Visual 3D software (C-Motion, Inc., Germantown, MD, USA). The trajectory of each reflective marker was filtered with a fourth-order Butterworth filter with a cutoff frequency of 5Hz,9 whereas kinetic data were filtered with a cutoff frequency of 10Hz. All attempts with two consecutive contacts (one with each foot) on a single force plate were included (between 6 and 24 valid attempts per child, totaling 121 attempts).
Identification of events with the force plateFS and TO events were automatically detected with the data from the force plate. Specifically, an FS was determined as the time point at which the force exceeded 10N, whereas a TO event was identified when the force dropped below the 5-N threshold.5 These time points were considered the reference standards for comparison with the time points detected by each of the tested algorithms. Detailed information about the algorithms can be found in the supplementary material.
Identification of events with the algorithm proposed by Hreljac and Marshall10This algorithm uses the vertical and anterior–posterior acceleration of the foot markers. An FS was defined as the peak vertical acceleration of the heel marker, which was determined by the time at which the derivative of acceleration (jerk) was equal to zero. A TO was defined as the peak anterior–posterior acceleration of the fifth metatarsal head marker, also determined by the time at which the jerk equaled zero.
Identification of events with the algorithm proposed by Ghoussayni et al.7This algorithm determines events based on a marker's speed in the sagittal plane, i.e., the combination of the speed of the vertical and anterior–posterior motions. An FS was defined as the time point at which the heel marker speed reached a threshold of 50cm/s on the sagittal plane, whereas a TO was defined as the time point at which the fifth metatarsal head marker speed reached 50cm/s. Similar to Bruening and Ridge,4 we found that the 5cm/s threshold recommended by Ghoussayni et al.7 was too low and increased it to 50cm/s.
Identification of events with the algorithm proposed by Hsue et al.11This algorithm uses the anterior–posterior foot marker acceleration. An FS corresponded to the minimum heel marker acceleration, whereas a TO was defined as the maximum heel marker acceleration. For an FS, Hsue et al.11 proposed the use of either the heel or fifth metatarsal head marker. However, in the present study, we used the heel marker because of its higher accuracy.
Identification of events with the algorithm proposed by Zeni et al.6This algorithm uses the anterior–posterior displacement of the foot markers with respect to the pelvis. An FS was determined by the maximum signal from the heel marker with respect to that from the sacrum marker on the anterior–posterior axis. A TO event was determined by the minimum signal from the fifth metatarsal head marker with respect to that of the sacrum marker on the anterior–posterior axis.
Identification of events with the algorithm proposed by Desailly et al.12This algorithm uses kinematic information combined with a specific sequence of marker displacement signal filtering in the anterior–posterior direction. First, the signal from the heel marker was used to determine the gait frequency. Then, this signal was filtered by a high-pass filter at a cutoff frequency of 0.5 times the gait frequency. The highest point of this filtered signal in the anterior–posterior direction was equivalent to a FS. For a TO event, the signal from the fifth metatarsal head marker was filtered by a high-pass filter at a frequency of 0.5 times the gait frequency, and the lowest point of this filtered signal in the anterior–posterior direction was equivalent to a TO. For TO events, Desailly et al.12 proposed a frequency equivalent to 1.1 times the gait frequency. However, in the present work, similar to Bruening and Ridge,4 we found that reducing this factor to 0.5 increased the accuracy of the algorithm.
Statistical analysisThe identification of FS and TO events by each of the algorithms was compared with the detection of the same events by the force plate. The data were grouped by the affected leg (i.e., one or two paretic legs in children with unilateral or bilateral SCP, respectively) and the unaffected leg (i.e., the non-paretic leg in children with unilateral SCP). To identify the best algorithm, we calculated the error as the difference in milliseconds between the events detected by each algorithm and those detected by the force plate. In a second analysis, the gait patterns of the children were considered, i.e., the data were grouped by the equinus and slide or drag gait patterns, and only the strides performed by the affected leg of the children with unilateral or bilateral SCP were considered. The time delay of detected events of the algorithms were compared with the respective time identified by the force plate, which was considered the reference standard. Repeated measures ANOVA was used to compare the accuracy of the algorithms in terms of this time difference. Post hoc paired t-tests with Bonferroni's correction were used to compare the algorithms. The significance level for ANOVA was α=0.05.
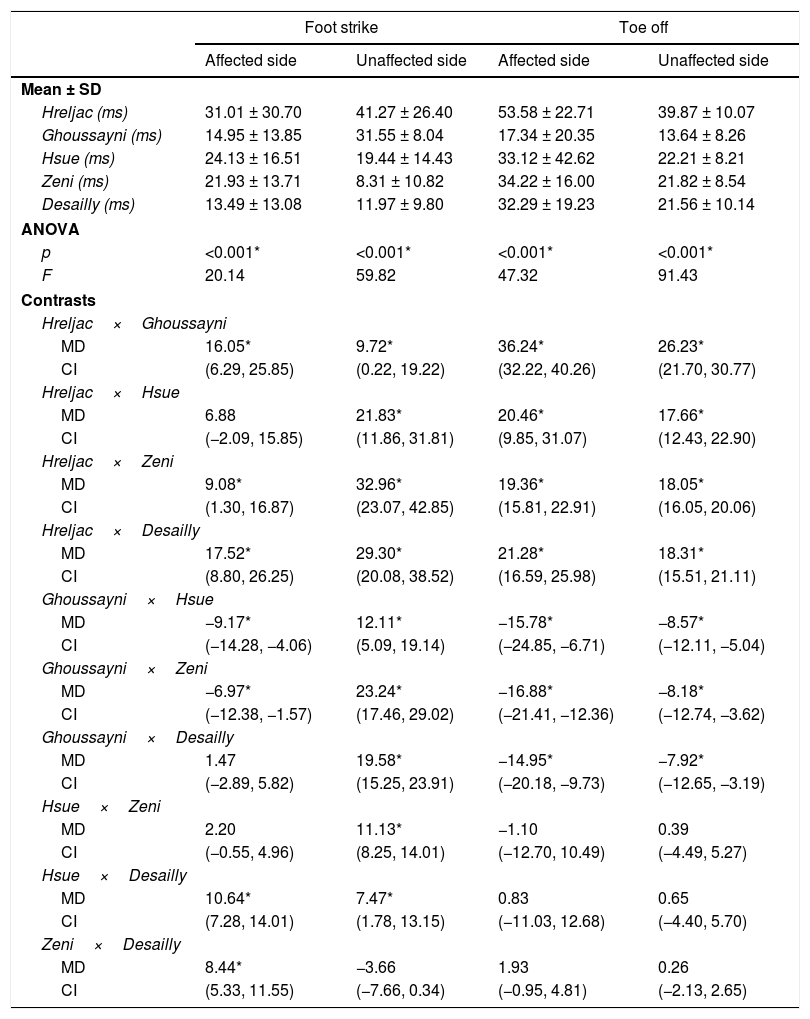
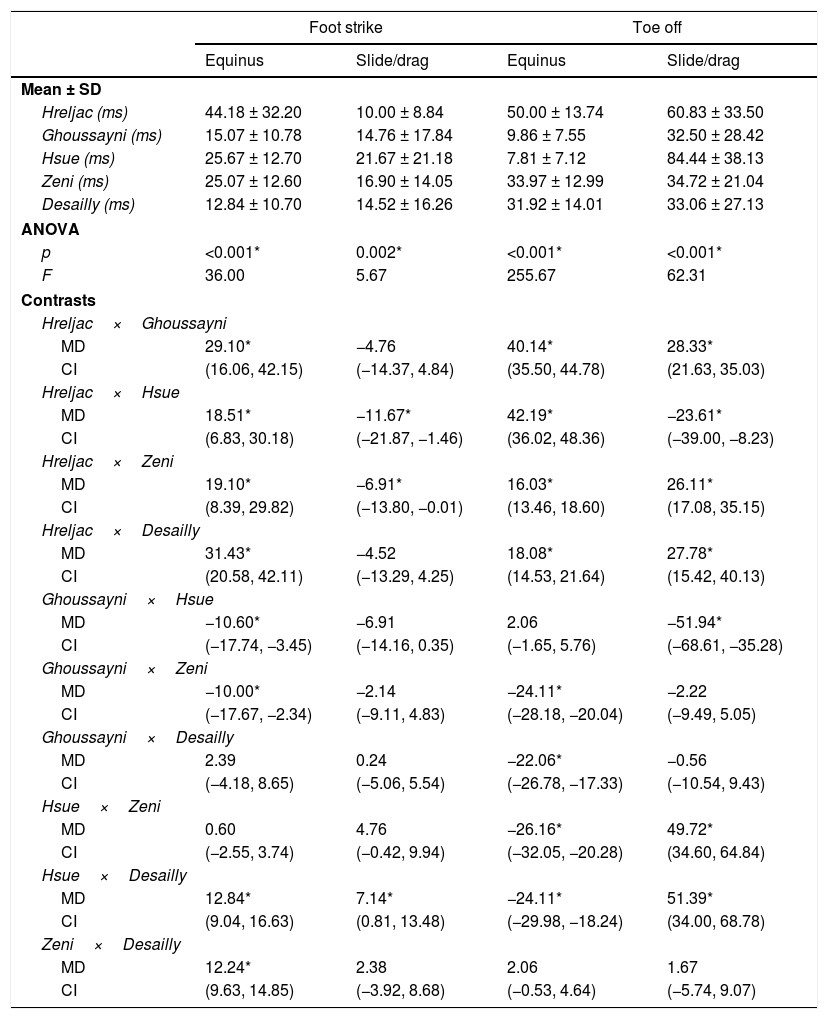
ResultsThe children who participated in the study achieved a total of 202 strides (202 FS and 194 TO events). Table 1 shows the ANOVA results, means and standard deviations of the time difference, in milliseconds, between the algorithms and the force plate of the identified FS and TO, for the affected and unaffected sides. Table 2 demonstrates the ANOVA results, means and standard deviations of the difference in event identification according to the children's gait patterns, i.e., equinus or slide/drag. None of the participants exhibited a steppage gait pattern.
Comparison of the errora of the algorithms in determining foot-strike and toe-off events for both the affected and unaffected sides.
| Foot strike | Toe off | |||
|---|---|---|---|---|
| Affected side | Unaffected side | Affected side | Unaffected side | |
| Mean ± SD | ||||
| Hreljac (ms) | 31.01 ± 30.70 | 41.27 ± 26.40 | 53.58 ± 22.71 | 39.87 ± 10.07 |
| Ghoussayni (ms) | 14.95 ± 13.85 | 31.55 ± 8.04 | 17.34 ± 20.35 | 13.64 ± 8.26 |
| Hsue (ms) | 24.13 ± 16.51 | 19.44 ± 14.43 | 33.12 ± 42.62 | 22.21 ± 8.21 |
| Zeni (ms) | 21.93 ± 13.71 | 8.31 ± 10.82 | 34.22 ± 16.00 | 21.82 ± 8.54 |
| Desailly (ms) | 13.49 ± 13.08 | 11.97 ± 9.80 | 32.29 ± 19.23 | 21.56 ± 10.14 |
| ANOVA | ||||
| p | <0.001* | <0.001* | <0.001* | <0.001* |
| F | 20.14 | 59.82 | 47.32 | 91.43 |
| Contrasts | ||||
| Hreljac×Ghoussayni | ||||
| MD | 16.05* | 9.72* | 36.24* | 26.23* |
| CI | (6.29, 25.85) | (0.22, 19.22) | (32.22, 40.26) | (21.70, 30.77) |
| Hreljac×Hsue | ||||
| MD | 6.88 | 21.83* | 20.46* | 17.66* |
| CI | (−2.09, 15.85) | (11.86, 31.81) | (9.85, 31.07) | (12.43, 22.90) |
| Hreljac×Zeni | ||||
| MD | 9.08* | 32.96* | 19.36* | 18.05* |
| CI | (1.30, 16.87) | (23.07, 42.85) | (15.81, 22.91) | (16.05, 20.06) |
| Hreljac×Desailly | ||||
| MD | 17.52* | 29.30* | 21.28* | 18.31* |
| CI | (8.80, 26.25) | (20.08, 38.52) | (16.59, 25.98) | (15.51, 21.11) |
| Ghoussayni×Hsue | ||||
| MD | −9.17* | 12.11* | −15.78* | −8.57* |
| CI | (−14.28, −4.06) | (5.09, 19.14) | (−24.85, −6.71) | (−12.11, −5.04) |
| Ghoussayni×Zeni | ||||
| MD | −6.97* | 23.24* | −16.88* | −8.18* |
| CI | (−12.38, −1.57) | (17.46, 29.02) | (−21.41, −12.36) | (−12.74, −3.62) |
| Ghoussayni×Desailly | ||||
| MD | 1.47 | 19.58* | −14.95* | −7.92* |
| CI | (−2.89, 5.82) | (15.25, 23.91) | (−20.18, −9.73) | (−12.65, −3.19) |
| Hsue×Zeni | ||||
| MD | 2.20 | 11.13* | −1.10 | 0.39 |
| CI | (−0.55, 4.96) | (8.25, 14.01) | (−12.70, 10.49) | (−4.49, 5.27) |
| Hsue×Desailly | ||||
| MD | 10.64* | 7.47* | 0.83 | 0.65 |
| CI | (7.28, 14.01) | (1.78, 13.15) | (−11.03, 12.68) | (−4.40, 5.70) |
| Zeni×Desailly | ||||
| MD | 8.44* | −3.66 | 1.93 | 0.26 |
| CI | (5.33, 11.55) | (−7.66, 0.34) | (−0.95, 4.81) | (−2.13, 2.65) |
The error was calculated as the difference, in milliseconds, of the events detected by each algorithm and those detected by the gold standard method (force plate); SD, standard deviation; ms, milliseconds; MD, mean difference; CI, 95% confidence interval for the difference; ANOVA, analysis of variance.
Comparison of the errora of the algorithms in determining foot-strike and toe-off events for the affected side according to the gait pattern.
| Foot strike | Toe off | |||
|---|---|---|---|---|
| Equinus | Slide/drag | Equinus | Slide/drag | |
| Mean ± SD | ||||
| Hreljac (ms) | 44.18 ± 32.20 | 10.00 ± 8.84 | 50.00 ± 13.74 | 60.83 ± 33.50 |
| Ghoussayni (ms) | 15.07 ± 10.78 | 14.76 ± 17.84 | 9.86 ± 7.55 | 32.50 ± 28.42 |
| Hsue (ms) | 25.67 ± 12.70 | 21.67 ± 21.18 | 7.81 ± 7.12 | 84.44 ± 38.13 |
| Zeni (ms) | 25.07 ± 12.60 | 16.90 ± 14.05 | 33.97 ± 12.99 | 34.72 ± 21.04 |
| Desailly (ms) | 12.84 ± 10.70 | 14.52 ± 16.26 | 31.92 ± 14.01 | 33.06 ± 27.13 |
| ANOVA | ||||
| p | <0.001* | 0.002* | <0.001* | <0.001* |
| F | 36.00 | 5.67 | 255.67 | 62.31 |
| Contrasts | ||||
| Hreljac×Ghoussayni | ||||
| MD | 29.10* | −4.76 | 40.14* | 28.33* |
| CI | (16.06, 42.15) | (−14.37, 4.84) | (35.50, 44.78) | (21.63, 35.03) |
| Hreljac×Hsue | ||||
| MD | 18.51* | −11.67* | 42.19* | −23.61* |
| CI | (6.83, 30.18) | (−21.87, −1.46) | (36.02, 48.36) | (−39.00, −8.23) |
| Hreljac×Zeni | ||||
| MD | 19.10* | −6.91* | 16.03* | 26.11* |
| CI | (8.39, 29.82) | (−13.80, −0.01) | (13.46, 18.60) | (17.08, 35.15) |
| Hreljac×Desailly | ||||
| MD | 31.43* | −4.52 | 18.08* | 27.78* |
| CI | (20.58, 42.11) | (−13.29, 4.25) | (14.53, 21.64) | (15.42, 40.13) |
| Ghoussayni×Hsue | ||||
| MD | −10.60* | −6.91 | 2.06 | −51.94* |
| CI | (−17.74, −3.45) | (−14.16, 0.35) | (−1.65, 5.76) | (−68.61, −35.28) |
| Ghoussayni×Zeni | ||||
| MD | −10.00* | −2.14 | −24.11* | −2.22 |
| CI | (−17.67, −2.34) | (−9.11, 4.83) | (−28.18, −20.04) | (−9.49, 5.05) |
| Ghoussayni×Desailly | ||||
| MD | 2.39 | 0.24 | −22.06* | −0.56 |
| CI | (−4.18, 8.65) | (−5.06, 5.54) | (−26.78, −17.33) | (−10.54, 9.43) |
| Hsue×Zeni | ||||
| MD | 0.60 | 4.76 | −26.16* | 49.72* |
| CI | (−2.55, 3.74) | (−0.42, 9.94) | (−32.05, −20.28) | (34.60, 64.84) |
| Hsue×Desailly | ||||
| MD | 12.84* | 7.14* | −24.11* | 51.39* |
| CI | (9.04, 16.63) | (0.81, 13.48) | (−29.98, −18.24) | (34.00, 68.78) |
| Zeni×Desailly | ||||
| MD | 12.24* | 2.38 | 2.06 | 1.67 |
| CI | (9.63, 14.85) | (−3.92, 8.68) | (−0.53, 4.64) | (−5.74, 9.07) |
The error was calculated as the difference, in milliseconds, of the events detected by each algorithm and those detected by the gold standard method (force plate); SD, standard deviation; ms, milliseconds; MD, mean difference; CI, 95% confidence interval for the difference; ANOVA, analysis of variance .
On the affected side, the algorithms reported by Ghoussayni et al.7 and Desailly et al.12 exhibited the highest performance in identifying FS events considering differences in milliseconds. Inferential statistical analysis revealed no differences between these two algorithms; however, these algorithms showed significantly less errors than the other algorithms in identifying gait events. For the unaffected side, the algorithms reported by Zeni et al.6 and Desailly et al.12 exhibited the highest performance in identifying FS events, whereas the algorithm reported by Ghoussayni et al.7 most accurately identified the TO events of both the affected and unaffected sides. The errors in determining FS events were similar for the algorithms reported by Zeni et al.6 and Desailly et al.12 However, the error of the algorithm reported by Ghoussayni et al.7 in identifying the TO events of both the affected and unaffected sides was different from that of the other algorithms.
After grouping the events of the affected side by gait type, the algorithms reported by Ghoussayni et al.7 and Desailly et al.12 exhibited the highest accuracy for FS event identification in equine gait pattern. These two algorithms showed less errors than the others. The algorithms reported by Ghoussayni et al.,7 Desailly et al.12 and Hreljac and Marshall10 exhibited the highest accuracy for FS event identification in the slide/drag gait pattern. These three algorithms showed less errors than the others. The algorithms reported by Ghoussayni et al.7 and Hsue et al.11 identified TO events with fewer errors in the equinus gait pattern. For the slide/drag gait pattern, TO event detection exhibited the greatest differences among all algorithms with respect to the force plate, and the algorithm reported by Ghoussayni et al.7 exhibited the highest accuracy. However, the results of an inferential comparison showed that the accuracy of the algorithm reported by Ghoussayni et al.7 was not different from that of the algorithm reported by Zeni et al.6 or Desailly et al.12
DiscussionIn the present study, the accuracy of gait event detection algorithms commonly used in the literature was tested against the results obtained using a force plate in children with unilateral or bilateral SCP. A smaller time difference between the event identified by the algorithm and that identified by the force plate corresponded to higher accuracy of the algorithm and greater dependability of the kinematic information, which relies on the accurate definition of the beginning and end of the stance phase.
Considering FS event identification in the affected limbs of all participants, the algorithms reported by Ghoussayni et al.7 and Desailly et al.12 exhibited the highest performance. A possible explanation for this result is that the algorithm reported by Ghoussayni et al.7 is the only algorithm that considers both planes (i.e., the vertical and anterior–posterior planes). Thus, the algorithm is robust regardless of the gait pattern. In contrast, the algorithm reported by Desailly et al.12 is the only algorithm that uses a filter to enhance the signal and render an FS event more easily identifiable. Thus, despite the fact that the algorithm uses only data from the anterior–posterior axis, it becomes more robust due to signal enhancement. As opposed to our results, Bruening and Ridge4 considered the algorithm reported by Ghoussayni et al.7 as the only one robust enough for the identification of events in different gait patterns.
For the unaffected side, the algorithms reported by Zeni et al.6 and Desailly et al.12 exhibited the best results for FS event identification. As mentioned above, the algorithm reported by Desailly et al.12 enhances the FS signal, rendering the event more easily detectable, which was true for both the affected and unaffected sides. The algorithm reported by Zeni et al.6 is robust for healthy individuals since it considers the typical relation between the pelvis and the foot. In normal gait patterns, FS always occurs when the foot reaches the most anterior position relative to the pelvis. Accordingly, the unaffected leg of children with SCP exhibited a gait pattern similar to a normal gait pattern. Therefore, even considering only one axis, the algorithm could detect events through the relation between the foot and the pelvis in the unaffected side. However, regarding the gait pattern of the affected side of children with SCP, Zeni et al.’s algorithm lost its accuracy, since the stride is shorter and the pelvis/foot relation is different.
The TO event is more difficult to identify than an FS event, because, at the expense of accuracy, the algorithms track the fifth metatarsal marker, which begins to move before the toes lose contact with the floor, thus increasing the variability of the measure. In the case of TO events, the algorithm reported by Ghoussayni et al.7 was the most accurate for both the affected and unaffected sides, probably because it is the only algorithm that considers the combined speed of both motion axes. This result is consistent with the observations reported by Bruening and Ridge.4
For FS detection according to gait pattern, the algorithms reported by Ghoussayni et al.7 and Desailly et al.,12 again, proved to be the most robusts. Since the algorithm reported by Ghoussayni et al.7 works with the relation of the combined speed on the sagittal plane rather than the marker position (Zeni et al.6) or the acceleration in only one plane (Hsue et al.11 and Hreljac and Marshall10), when the pelvis/foot relation is less distinct and the speed and acceleration of the segments are lower and more diffuse, this result is expected. The algorithm reported by Desailly et al.,12 which enhances the behavior of the foot marker displacement by filtering the signal, was able to precisely identify FS events. Changes in the speed and acceleration of a segment and the relative position were not considered and did not affect the results of this algorithm.
For the identification of TO events, the algorithms reported by Ghoussayni et al.7 and Hsue et al.11 identified all equinus gait events within an error up to ten milliseconds. In the equinus gait pattern, in which the ankle is fixed in the plantarflexion position, the vertical motion of the heel is not as pronounced as the anterior–posterior motion. Thus, the algorithms reported by Hsue et al.,11 Hreljac and Marshall10 and Desailly et al.,12 which identify TO events using the anterior–posterior acceleration of the heel marker are more adequate for children with equinus gait. However, the algorithm of Hreljac and Marshall10 did not exhibit results as good as those reported by Hsue et al.11 and Desailly et al.12 This result was possibly because the third derivative of the heel marker position used by Hreljac and Marshall10 requires an additional mathematical processing step, which might have enhanced the tracking error. Such error magnification might explain the poor performance of this algorithm in all of the studied situations.
The identification of TO events in the slide/drag gait pattern exhibited the worst performance by all algorithms with respect to the force plate. Nevertheless, the algorithm reported by Ghoussayni et al.7 exhibited the highest accuracy. In this case, since the gait is characterized by foot dragging, the acceleration parameters can detect the event while the foot is still in contact with the force plate. Once the algorithm reported by Ghoussayni et al.7 considers both anterior–posterior and vertical motion, it is more likely to detect as many events as the force plate.
The algorithm reported by Hreljac and Marshall10 exhibited the worst performance in all comparisons because it considers only vertical acceleration, whereas the acceleration does not always reach its peak during FS. Similarly, for TO detection, it considers only the acceleration peak on the anterior–posterior axis. However, the participants in the present study performed the TO event gradually and did not always exhibit a clear acceleration peak, hampering the correct identification of this event by the algorithm. The lower accuracy of the algorithm reported by Hreljac and Marshall10 in identifying TO events was also found in the study performed by Bruening and Ridge.4
Although the present study followed a rigorous methodology, it has some limitations. The major limitation is the small sample size. Nevertheless, despite the low number of participants, a large number of strides were analyzed. Another limitation of the study is that only two gait patterns were represented (equinus and slide or drag). A sample containing individuals with steppage and miscellaneous gait patterns would have yielded more comprehensive results.
ConclusionThe algorithm proposed by Ghoussayni et al.7 provided the best event identification in all situations, except for the identification of FS events on the unaffected side in children with unilateral SCP. In this case, the algorithms proposed by Desailly et al.12 and Zeni et al.6 provided better identification results. Our results suggest that the algorithm reported by Ghoussayni et al.7 can be used for the detection of gait events in children with SCP in situations when a force plate is not available.
Conflicts of interestThe authors declare no conflicts of interest.
The authors thank the parents for allowing their children's voluntary participation and the children who participated in this study, as well as the Associação Mineira de Reabilitação (AMR), Belo Horizonte, Brazil, for facilitating the participants’ recruitment.
The following are the supplementary data to this article:



